پژوهشگران دانشگاه MIT، نوعی گریپر رباتیک ابداع کردهاند که میتواند اشیای باریکی مانند طناب و سیم را بردارد. شاید این فناوری روزی به رباتها کمک کنند تا کارهایی مانند تا کردن لباس و یا کارهای فنیتری مانند شکل دادن به سیمها را انجام دهند.
معمولا انسانها در کار با اشیای باریک و انعطافپذیر با مشکل روبرو میشوند، بنابراین تصور میشد رباتها هرگز نتوانند چنین مشکلاتی را حل کنند. اما حالا «ریچل گوردون» سخنگوی دانشگاه MIT میگوید با استاندارد جدیدی که دانشمندان طراحی کردهاند، از رباتها میتوان برای «مجموعهای از کارهای ظریف و تغییر شکل افزایشی استفاده کرد».
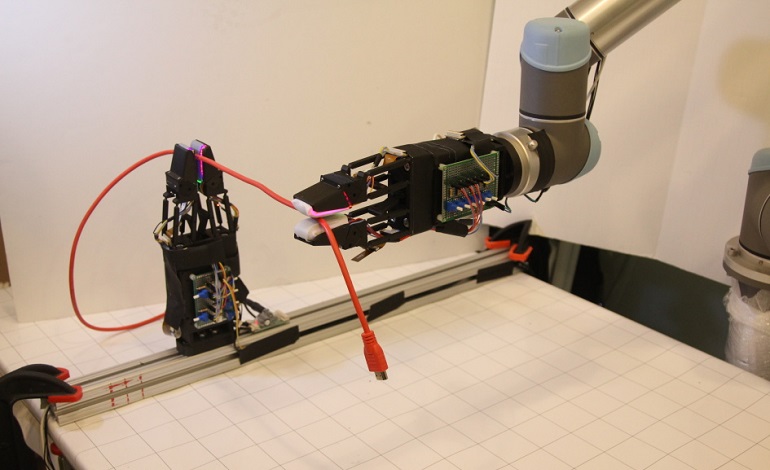
محققین برای این منظور دو بازوی مکانیکی گیرهمانند طراحی کردهاند که به عبارتی تداعیکننده انگشتان دست هستند. هر کدام از انگشتهای طراحی شده مجهز به سنسورهای لمسی با رزولوشن بالا به اسم «GelSight» هستند که از لاستیک نرم و چند لنز تشکیل شده و با یک بازوی متحرک همراه است. این سیستم دو کنترلر مجزا دارد: یکی برای تنظیم قدرت انگشتان، و دیگری برای حالت دادن به کابل در جریان حرکت در نظر گرفته شده.
ریچل گوردون سخنگوی MIT گفت که این فناوری میتواند روش استانداردی برای رباتها باشد تا به ابزار باریک شکل دهند و با آنها کار کنند. کار کردن با سیمها برای رباتها دشوار است زیرا باید بتوانند هنگام کار کردن با سیم، از افتادن آن نیز پیشگیری کنند. ربات ام.آی.تی در آزمایشها توانست چندین وظیفه از جمله یافتن انتهای سیم و اتصال آن را انجام دهد. در هر حال، هنوز باید کارهای دیگری در این پروژه انجام شوند تا ربات بتواند با همه سیمها کار کند و عملکرد آن بهبود یابد.